Зачем доверять нам своему бизнесу?
Мы берем панику вне закупок.Мы накладываем миллионы труднодоступных частей из наших доверенных источников.Мы обновляем наши списки продукта через минуту, а онлайн-покупки завершены в режиме реального времени и отправлены каждый день.
Основанная в 2002 году, Instockin является местным лидером в распределении электронных компонентов и также признан одной из самых уважаемых и инновационных компаний на местном рынке сегодня.Штаб-квартира в Гонконге, Instockin заработала впечатляющую репутацию для предоставления выдающегося обслуживания и разработка эффективных, всеобъемлющих глобальных цепочек поставок.
Учить больше >
Летающая белка беспилотника показывает ловкость
Новый беспилотник, вдохновленный биографией, смоделированный после летающей белки, привносит замечательную ловкость и контроль в воздушной робототехнике, открывая двери для продвинутых применений в области спасения, наблюдения и многого другого.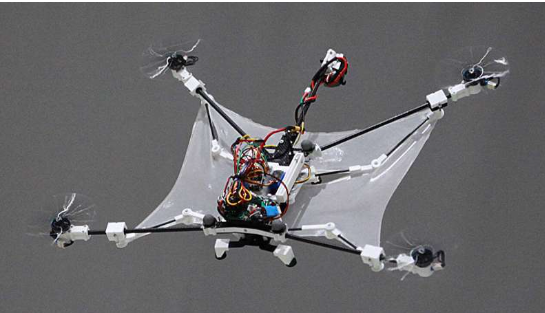
Дроны уже превращаются в отрасли промышленности из кинопроизводства в сельское хозяйство, но исследователи теперь продвигают свои пределы дальше.Инженеры из Университета науки и технологий в Южной Корее в сотрудничестве с Агентством по технологиям автономии AI Development Develop.
Летающая белка использует кулаки кожи, растянутые между его конечностями, чтобы скользить и контролировать его спуск.Подводя ими, исследовательская группа создала беспилотник, который может развернуть крылатые мембраны на силиконовой основе для генерации аэродинамического сопротивления, что позволяет провести быстрые остановки и резкие изменения направления-движения, которые стандартные беспилотники часто пытаются выполнить.
Их последнее исследование основывается на более ранней работе, которая вводила концепцию и подкрепление методов обучения, используемых для обучения беспилотника.Эта новая версия включает в себя новую стратегию координационного контроля (TWCC), основанную на нейронной сети, обученной прогнозированию аэродинамического сопротивления.Система управления координирует как развертывание крыла, так и двигательное тягу в режиме реального времени для достижения гладкого, реактивного полета.
Важно отметить, что беспилотник полностью функционирует на бортовом микроконтроллере, не требуя каких-либо внешних вычислений, что создает легкие, энергоэффективные и очень адаптируемые.Это отличает его от других продвинутых беспилотников, которые зависят от внешних вычислений.Исследовательская группа также разработала компактную аппаратную конструкцию, которая позволяет быстро развертываться или убираться или убираться, поддерживая стандартную форму Quadrotor, когда крылья не используются.Их беспилотник демонстрирует точное отслеживание траектории и предотвращение препятствий, потенциально прокладывая путь для будущих приложений в области удаленного мониторинга, поиска и спасения, защиты и кинематографии.
Заглядывая в будущее, команда планирует расширить возможности скольжения и посадки беспилотника, изучая реальное поведение белки, стремясь позволить беспилотнику приземлиться на вертикальных поверхностях, таких как стены или деревья - подобно его биологическому вдохновению.«Мы были вдохновлены способностью летающих белок быстро замедляться, прежде чем приземлиться, распространяя их конечности»,-сказал исследователи Дохьон Ли, Джун-Гилл Кан и Сохи Хан.«Мы полагали, что аналогичный контроль на основе сопротивления может быть применен к беспилотникам для расширения своих динамических способностей».